| 前导 |
|---|
| 拉普拉斯变换 |
| Z 变换 |
拉普拉斯变换
基本定义
容易证明,复指数信号 $e^{st}$ 是一切 LTI 系统的特征函数,即 $y(t)=h(t)*e^{st}=H(s)e^{st}$,当 $s=j\omega$ 时就可得到连续时间傅里叶变换。因此拉普拉斯变换可视为傅里叶变换的推广:
\[X(s)=\int_{-\infty}^\infty x(t)e^{-st}{\rm d}t\qquad s=\sigma+j\omega\] \[x(t)=\frac{1}{2\pi j}\int_{-\infty}^\infty X(s)e^{st}{\rm d}s\]观察易知 $X(s)=\mathcal{F}[x(t)e^{-\sigma t}]$,也就是说只要有合适的 $\sigma$ 存在,就可以通过引入收敛因子 $e^{-\sigma t}$ 使得某些本来不满足狄里赫利条件的信号适用于拉普拉斯变换。例如单位阶跃函数 $u(t)$,我们知道它不存在一般意义下的傅里叶变换,但存在拉普拉斯变换:
\[\mathcal{L}(u(t))=\int_{0}^\infty e^{-st}{\rm d}t=\frac{1}{s}\quad \Re(s)>0\]注意对上述积分来说只有在 $s$ 的实部大于零时积分才收敛。因此对于拉普拉斯变换,它的收敛域(ROC)很重要。一般情况下单边信号的收敛域为单边无界,双边信号的收敛域为双边有界/无界;因此对于一个给定的拉普拉斯变换形式,根据所给收敛域的不同其原信号的形式也有所不同。
常见拉普拉斯变换对
| 变换对 | 收敛域 |
|---|---|
| $u(t)\leftrightarrow\displaystyle\frac{1}{s}$ | $\Re(s)>0$ |
| $e^{-bt}u(t)\leftrightarrow\displaystyle\frac{1}{s+b}$ | $\Re(s)>-b$ |
| $-e^{-bt}u(-t)\leftrightarrow\displaystyle\frac{1}{s+b}$ | $\Re(s)<-b$ |
| $e^{-b\vert t\vert}\leftrightarrow\displaystyle\frac{1}{s+b}-\frac{1}{s-b}$ | $-b<\Re(s)<b$ |
| $\delta(t)\leftrightarrow1$ | S 平面 |
| $\delta(t-t_0)\leftrightarrow e^{-st_0}$ | S 平面 |
| 常用信号 | 拉普拉斯变换 |
|---|---|
| $\cos\omega t\cdot u(t)$ | $\displaystyle\frac{s}{s^2+\omega^2}$ |
| $\sin\omega t\cdot u(t)$ | $\displaystyle\frac{\omega}{s^2+\omega^2}$ |
| $e^{-bt}\cos\omega t\cdot u(t)$ | $\displaystyle\frac{s+b}{(s+b)^2+\omega^2}$ |
| $e^{-bt}\sin\omega t\cdot u(t)$ | $\displaystyle\frac{\omega}{(s+b)^2+\omega^2}$ |
| $t^ne^{-at}u(t)$ | $\displaystyle\frac{n!}{(s+a)^{n+1}}$ |
零极点图
多数拉普拉斯变换的形式都包含分式形式,其中令分母为零可得到极点,令分子为零可得到零点。我们可以通过研究 S 平面内的极点矢量和零点矢量的性质研究信号的幅度和相位特性。
\[X(s)=\frac{1}{s-a}\qquad\vec{V}=s-a\]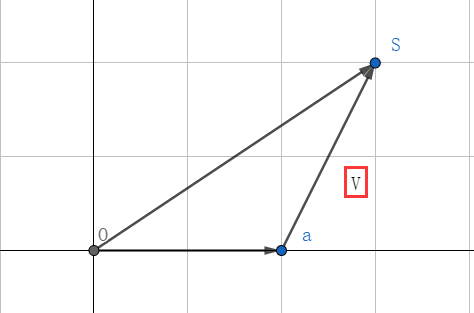
如图所示的极点矢量满足如下关系:
\[|\vec{V}|=\frac{1}{|X(s)|}\qquad\angle\vec{V}=-\angle X(s)\]而零点矢量的性质与极点矢量刚好相反,其满足:
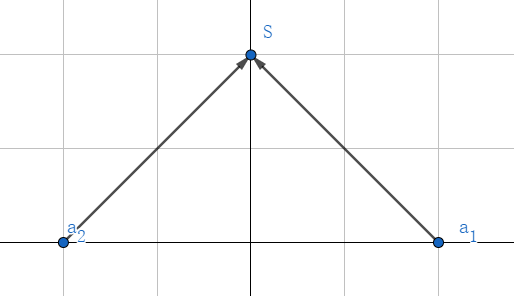
\[|\vec{V}|=|X(s)|\qquad\angle\vec{V}=\angle X(s)\]当矢量 $S$ 在轴 $\sigma=0$ 上滑动时即可借助零极点图研究信号的频率 $\omega$。显然该信号的幅度最大值位于 $\omega=0$ 处;相位为关于 $\omega$ 的奇函数,上界为 $\pi/2$。
再例如 $H(s)=\displaystyle\frac{s-a}{s+a}$,其零点矢量与极点矢量关于 $j\omega$ 轴对称,因此 $H(s)$ 的幅度始终为常数,该系统为全通系统。
零极点图反映了系统的频响特征,注意好极点矢量和零点矢量,幅频相乘,相频相加即可。
拉普拉斯变换的性质
注:在使用性质时要注意收敛域的变化,收敛域至少为两收敛域的交集(可能会扩充);初值定理与终值定理均针对单边拉普拉斯变换。
| 特性 | 变换对/特性 |
|---|---|
| 线性 | $ax(t)+bv(t)\leftrightarrow aX(s)+bV(s)$ |
| 时移性 | $x(t-t_0)\leftrightarrow X(s)e^{-st_0}$ |
| 时间尺度变换 | $x(at)\leftrightarrow\displaystyle\frac{1}{a}X(\frac{s}{a})\quad a>0$ |
| 频域微分 | $t^nx(t)\leftrightarrow (-1)^n\displaystyle\frac{d^n}{ds^n}X(s)\quad n=1,2\dots$ |
| 频移性 | $x(t)e^{js_0}\leftrightarrow X(s-s_0)$ |
| $\sin(\omega_0t)$ 频移性 | $x(t)\sin(\omega_0t)\leftrightarrow\displaystyle\frac{j}{2}[X(s+j\omega_0)-X(s-j\omega_0)]$ |
| $\cos(\omega_0t)$ 频移性 | $x(t)\cos(\omega_0t)\leftrightarrow\displaystyle\frac{1}{2}[X(s+j\omega_0)+X(s-j\omega_0)]$ |
| 时域微分 | $\dot x(t)\leftrightarrow sX(s)-x(0)$ |
| 二阶导数 | $\ddot x(t)\leftrightarrow s^2X(s)-sx(0)-\dot x(0)$ |
| 积分性质 | $\displaystyle\int_0^tx(\lambda){\rm d}\lambda\leftrightarrow\frac{X(s)}{s}$ |
| 卷积性质 | $x(t)*v(t)\leftrightarrow X(s)V(s)$ |
| 初值定理 | $x(0)=\displaystyle\lim_{s\rightarrow\infty}sX(s) \ \dot x(0)=\lim_{s\rightarrow\infty}s^2X(s)-sx(0)$ |
| 终值定理 | 如果 $\displaystyle\lim_{t\rightarrow\infty}x(t)$ 存在,则 $\displaystyle\lim_{t\rightarrow\infty}x(t)=\displaystyle\lim_{s\rightarrow\infty}sX(s)$ |
系统拉普拉斯分析
拉普拉斯变换十分适合处理初始条件不松弛的因果系统。换句话说,所谓单边拉普拉斯变换,实质是针对因果信号的变换。我们以一阶因果系统为例:
\[\frac{dy(t)}{dt}+ay(t)=bx(t)\qquad y(0^-)=0\]对两边做拉普拉斯变换有:
\[sY(s)-y(0^-)+aY(s)=bX(s)\] \[Y(s)=\frac{b}{s+a}X(s)\Rightarrow Y(s)=H(s)X(s)\]如上为使用拉普拉斯变换分析系统的一般过程,其中 $H(s)$ 又称为传输函数。对于高阶系统,均可借助分式拆分将其拆解为多个一阶系统和二阶系统。
Z 变换
基本定义
Z 变换与拉氏变换相对应,是离散时间傅里叶变换的推广($z=re^{j\omega}$):
\[X(z)=\sum_{n=-\infty}^\infty x(n)z^{-n}=\sum_{n=-\infty}^\infty x(n)r^{-n}e^{-j\omega n}=\mathcal{F}[x(\omega)r^{-n}]\]DTFT 就是在单位圆($r=1$)上进行的 Z 变换。Z 变换的大部分性质与 DTFT 相似,其收敛域 ROC 的性质也与拉氏变换中的 ROC 类似。Z 变换的反变换如下:
\[x(n)=\frac{1}{2\pi}\int_{2\pi}X(z)r^ne^{j\omega n}{\rm d}\omega=\frac{1}{2\pi j}\oint_CX(z)z^{n-1}{\rm d}z\]常用 Z 变换对
| 变换对 | 收敛域 |
|---|---|
| $u(n)\leftrightarrow\displaystyle\frac{1}{1-z^{-1}}$ | $\vert z\vert>1$ |
| $a^nu(n)\leftrightarrow\displaystyle\frac{1}{1-az^{-1}}$ | $\vert z\vert>\vert a\vert$ |
| $-a^nu(-n-1)\leftrightarrow\displaystyle\frac{1}{1-az^{-1}}$ | $\vert z\vert<\vert a\vert$ |
| 常用信号 | Z变换 |
|---|---|
| $\displaystyle\sum_{i=0}^kx(i)$ | $\displaystyle\frac{z}{z-1}X(z)$ |
| $(n+1)u(n)$ | $\displaystyle\frac{z^2}{(z-1)^2}$ |
| $(\cos\Omega n)u(n)$ | $\displaystyle\frac{z^2-(\cos\Omega)z}{z^2-(2\cos\Omega)z+1}$ |
| $(-1)^n$ | $\displaystyle\frac{z}{z+1}$ |
收敛域性质
多个收敛域的叠加同拉氏变换,至少为它们的交集(若零极点抵消会扩大范围)。单个收敛域的相关性质如下:
- 在 ROC 内,$X(z)$ 无极点
- 有限长序列的 ROC 是整个有限 Z 平面(可能不包括 $z=0, \vert z\vert=\infty$)
- 右边序列的 ROC 是某个圆的外部,可能不包括 $\vert z\vert=\infty$
- 左边序列的 ROC 是某个圆的内部,可能不包括 $z=0$
- 双边信号的 ROC 如果存在,它是 Z 平面上以原点为圆心的环状区域
系统 Z 变换分析
LTI 系统的特性也可以由 $H(z)$ 连同 ROC 来表征:
- 因果性:$n=0$ 时有 $h(n)=0$,即 $H(z)$ 的 ROC 是最外部极点的外部,并且包括 $\vert z\vert=\infty$
- 稳定性:$h(n)$ 绝对可和,即 $H(z)$ 的 ROC 必须包括单位圆
对大部分有理形式的 Z 变换,均可通过部分分式展开拆解为多个一阶和二阶系统的和,利用 Z 变换对直接求解。而对于因果信号的 Z 变换(也称单边 Z 变换),由于其特有的时移性质:
\[x(n-1)\leftrightarrow z^{-1}X(z)+z(-1)\qquad x(n+1)\leftrightarrow zX(z)-zx(0)\]因此单边 Z 变换十分适合处理初始不松弛的增量线性系统。如:$y(n)+3y(n-1)=x(n)$,$x(n)=u(n)$,$y(-1)=1$,对两边做 Z 变换有:
\[Y(z)+3z^{-1}Y(z)+3y(-1)=X(z)\qquad H(z)=\frac{1}{1+3z^{-1}}\] \[\Longrightarrow Y(z)=H(z)[X(z)-3]\]上式可以清晰地看出,零状态响应和零输出响应对系统的影响。代入化简后即可借助 Z 变换对得到最终结果。